
Implementando o computador de bordo para o BRElétrico
20 de Agosto de 2019, 4:29 - sem comentários aindaO módulo de computador de borda do BRElétrica será construído a partir do Beagle Bone Black (BBB).
O BBB é um computador numa única placa e foi escolhido para ser o computador de bordo da BRElétrica por ter um microprocessador ARM, duas Programmable Real-time Unit (PRU), interface HDMI, porta ethernet, porta USB, duas controladoras CAN. Além disso, já vem com Linux embarcada e toda estrutura de software para habilita-lo como servidor com toda funcionalidade TCP-IP internet inerente do Linux. A figura 1 mostra o diagrama do bloco do computador de bordo com display, rede CAN e rede TCP-IP. O BBB funcionará como ponte entre as duas redes CAN e a rede TCP-IP. A partir da rede TCP-IP pode-se ter acesso ao BBB permitindo a sua monitoração remoto ou re-programação.
A primeira rede Can (Can0) estará ligado aos subsistemas críticos do veículo elétrica, fazendo o monitoramento do banco do bateria, o motor de tração e outros subsistemas que precisam comunicar entre se neste barramento mas rápido.
A segunda rede (Can1) permitirá a comunicação entre o modulo de medição de velocidade e temperatura, o módulo de sinalização e luzes e demais módulos que não são críticos ao funcionamento do veículo. A comunicação destes útimo barramento pode ter uma velocidade menor que o primeiro.
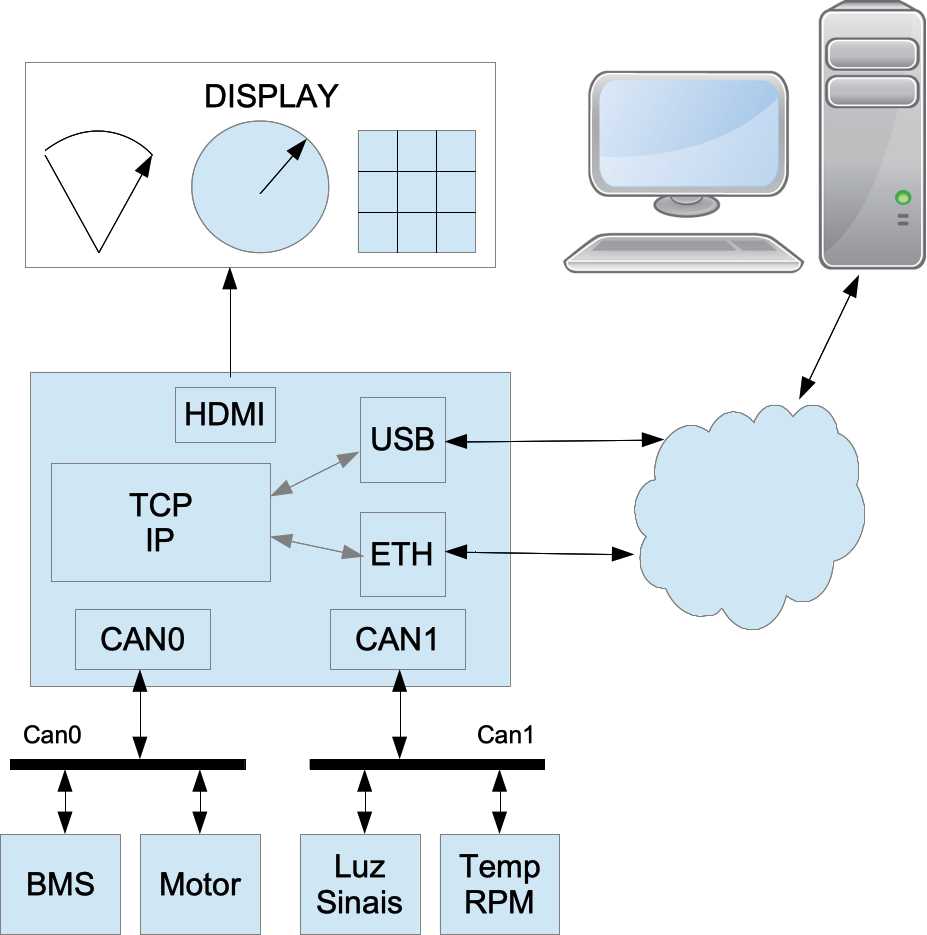
Figura 1 - Diagrama de blocos do sistema
O sistema operacional Linux embarcada no BBB já vem com pacote SocketCan ou can-utils de ferramentas para trabalhar com a rede de comunicação CAN. Este pacote de ferramentas e utilitários permite visualizar, registrar e gerar tráfego de dados do barramento CAN, além de permitir acesso ao barramento CAN via IP sockets entre vários outros funcionalidades. https://github.com/linux-can/can-utils
Os utiltários candump do SocketCan permite visualizar os dados do barramento de comunicação, mas também é possível acessar a porta can a partir de programas desenvolvido em C/C++ ou Python.
Há uma vasta documentação técnica sobre o uso do SocketCan em sistemas operacionais Linux, mas a parte mais difícil até o presente momento tem sido a configuração do BBB para ativar os dois controladores CAN, habilitar o hardware de interfaceamento com os transcievers CAN e configurar a porta de comunicação no linux para conversar com os controladores.
A dificuldade consiste no fato de o BBB ter um sistemática de mapeamento de hardware no sistema operacional Linux específica, diferente dos computadores convencionais. O BBB é um computador numa única placa que usa o processador com arquitetura ARM. Por conta dos inúmeros sistemas baseados no arquitetura ARM que surgiram para sistemas embarcadas, houve uma modificação no Kernel do Linux para dar conta a especificidades destes sistemas.
No sistema operacional Linux convencional as especificidades do hardware são de certa forma incorporadas no Kernel, mas este sistemática se mostrou impraticável com as placas ARM. Por isso foi introduzido a estrutura de Device Tree para que o computador (BBB) saiba qual hardware e periféricos estão fisicamente instalados na placa. Veja o artigo de Mateus Gagliardi: Introdução ao uso de Device Tree e Device Tree Overlay em Sistemas Linux Embarcado. 2015.
No caso do BBB essa estrutura de Device Tree tem que dar conta para definir quais pinos serão usados do hardware, pois BBB tem portas genéricas para entrada e saída de dados (GPIO), uma porta analógica (ADC), PWM, UART, SPI e I2C pinos, e estes pinos podem ser configurados para diversos usos. No nosso caso específico, as duas controladoras CAN usam alguns dos pinos da UART e do I2C como entrada e saída dos sinais CAN.
Veja artigo de Bruno Oliveira 2017 - Aplicação rede CAN com BBB e Python https://www.embarcados.com.br/can-com-beaglebone-black-e-python/
Desenvolvendo o CAN-BUS para o BR-Elétrico
25 de Fevereiro de 2018, 12:56O Gurgel BR800 foi projetado pelo Gurgel Motores na década de setenta com uma proposta inovadora de ser um veículo leve, pequeno, acessível, ou seja, o primeiro carro popular brasileiro. Estes caractersíticas tornam-o apropriadao para ser convertido para tração elétrica. Entretanto, a proposta de transformação do BR800 não se resumo somente a trocar a máquina de tração, mas tem como proposta desenvolver tecnologias para a eletrificação do setor de transportes. Neste sentido os princípios que nortearam a transforção são:
- O carro será usado como laboratório com acesso fácil a todos os novos componentes;
- Instalação de instrumentação em todos os pontos de interesse para ter o máximo de dados;
- Tecnologia livre: código fonte aberta e também hardware não proprietário;
A conversão se iniciou com a instalação de um motor elétrica e banco de baterias. A instalação do motor elétrico e seu sistema de refrigeração foi desenhada de tal forma que facilite o acesso aos componentes e sua instrumentação. O banco de baterias também foi organizado em módulos para faciliar o acesso e manuseio.
A segunda etapa da conversão é oredesenho de toda parte elétrica convencional do carro, como por exemplo, farois, luzes e demais assessórias num barramento usando tecnologia CAN-BUS. O BR800 foi desenvolido na década de oitenta e naquela época o sistema elétrico do veículo era realizado com relés e interruptores. Dessa forma é necessária desenhar um novo arranjo da instalação elétrica do carro, levando em conta a necessidade de instrumentação e monitoramento, segurança, e eficiência energética.
A estratégia será de organizar a parte elétrica em diversos subsistemas inteligentes aue conversarão entre si por meio de uma rede de comunicação. Essa rede de comunicação será baseada na tecnologia CAN, e a seguir serão descritos os diversos subsistemas e sua funcionalidade.
Subsistemas
Os veículos modernos usam diversos subsistemas específicos para controlar as diversas funcionalidades do carro e estes subsistemas comunicam uns com os outros usando o barramento de comunicação. Os principais subsistemas são:
- Subsistema de tração e freio;
- Subsistema de armazenamento de energia;
- Subsistema de instrumentação e sinalização;
- Subsistema de portas, vidros e demais assessórios.
Há dois barramentos de comunicação no veículo. O primeiro é barramento CAN de alto velocidade que estabelece a comunicação entre os subsistemas críticos como tração e armazenamento. A comunicação entre os demais subsistemas é realizado por um barramento CAN de baixa velocidade e normalmente o subsistema de instrumentação também funcionará como ponte entre os dois barramentos.
No BRElétrico o barramento CAN de alto velocidade liga seguintes componentes:
- Controlador do Motor (PM BLDC Guandong);
- Battery Management System (EK-YT-21-BMS);
- Módulo de armazenamento 12V e 24V;
- Computador de Bordo.
O barramento CAN de baixa velocidade interliga:
- Módulo de controle de luzes e sinalização;
- Módulo de monitoramento de velocidade, temperatura e óleo de freio;
- Computador de Bordo.
O diagrama de blocos abaixo mostra os componentes e os dois barramentos CAN

Assim o subsistema de tração do veículo, composto pelo motor elétrico e o seu controlador recebe os comandos de velocidade e direção do condutor e disponibiliza todos os dados como rotação do motor, tensão e corrente do motor, temperatura do controlador etc, no barramento CAN de alta velocidade.
Da mesma forma o sistema de armazenamento de energia composto pelas baterias, o BMS (Battery Management System), também disponibiliza os dados pelo barramento CAN de alta velocidade.
O computador de bordo funcionará como ponte entre as duas barramentos e também apresentará os dados do funcionamento do veículo por meio de uma interface interativa. Os módulos funcionais são:
- Controlador de Motor (PM BLDC Guandong)
- Battery Management System (EK-YT-21-BMS)
- Computador de Bordo
- Modulo de controle de luzes e sinalização (Luzes, setas, etc..)
- Modulo de monitoramento de velocidade, temperatura e óleo de freio
- Modulo de armazenamento de 12v e 24v
1. Módulo Controlador de Motor
PM BLDC Guandong
2. Módulo Battery Management System
EK-YT-21-BMS
3. Módulo Computador de bordo
Escolheu-se para o computador de bordo o minicomputador Beagle Bone. A sua escolha se baseou no fato de ter uma arquitetura apropriado para sistemas embarcadas, ter além do processador principal, dois PRU que podem ser usados para alguma necessidade de processamento dedicado e dois controladores CAN já incorporados na sua placa.
4. Módulo de controle de luzes e sinalização
Este módulo será desenvolvido a partir do popular Arduino. Escolheu-se esta placa microcontroladora por sua popularidade, grande acervo técnico de suporte e relação custo benefício.
5. Modulo de monitoramento de velocidade, temperatura e óleo de freio
Da mesma forma do módulo anterior, escolheu-se implementar este módulo usando Arduino.
6. Modulo de armazenamento de 12v e 24v
Este módulo terá a função de carregar e monitorar as baterias de 12v e 24v. Além de permitir a carga das baterias a partir da rede elétrica convencional, este módulo também vai ter que permitir a alimentação dessas baterias a partir do banco de baterias de tração e do painel de energia solar no teto do veículo.
Primeira volta do BR Elétrico
26 de Dezembro de 2017, 0:37Publiquei no dia 24 de dezembro de 2017 o vídeo sobre a conversão do BR 800 para tração elétrica. Confere o vídeo em : BREl_trica_UnB_-_Medium.mov
Reportagem sobre laboratório de veículos elétricos
12 de Abril de 2017, 22:37Veja reportagem sobre laboratório de veículos elétricos da FGA gravada pela UnB TV no link
https://www.youtube.com/watch?v=1t8JRR2jffk
Programa de entrevista da TVNBR Cenas do Brasil discute os avanços e desafios do Programa Luz para Todos. 2015.
17 de Novembro de 2015, 8:10Participei de programa de entrevista na TVNBR para debater os rumos do Programa Luz para Todos do Governo Federal em setembro 2015. Link para a entrevista